Machine Vision Anwendungen sind so vielfältig wie auch die 3D-Sensortechnologien, welche jenen Applikationen Abhilfe schaffen. Kamerasysteme mit strukturiertem Licht sind eine bevorzugte Lösung, wenn es auf Präzision ankommt, aber weder hohe Bildraten noch Farbinformationen erforderlich sind. Die Stereobildverarbeitung hingegen ist die bevorzugte Technologie, wenn Messungen bei Tageslicht und/oder über große Messdistanzen durchgeführt werden sollen, hat aber Schwierigkeiten bei texturlosen Oberflächen.
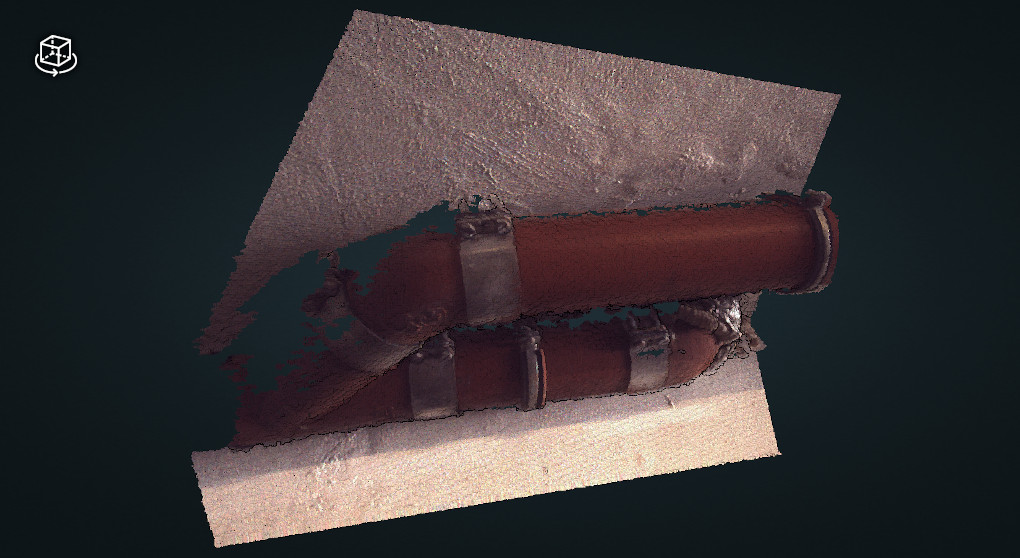
Unsere neue Ruby 3D-Tiefenkamera kombiniert die besten Eigenschaften der genannten 3D-Vision-Technologien: Stereovision und strukturiertes Licht. Die Tiefenkamera verfügt über drei Bildsensoren: zwei monochrome Sensoren für die Tiefenwahrnehmung und einen zusätzlichen Farbsensor. Ergänzend wurde ein Infrarotmusterprojektor integriert, der die Tiefenwahrnehmung verbessert, aber für den Farbsensor unsichtbar ist.
Damit ist unsere Ruby 3D-Tiefenkamera eine der flexibelsten 3D-Vision-Lösungen und das zu einem wirklich erschwinglichen Preis!